2002-2003
Urban Search and Rescue
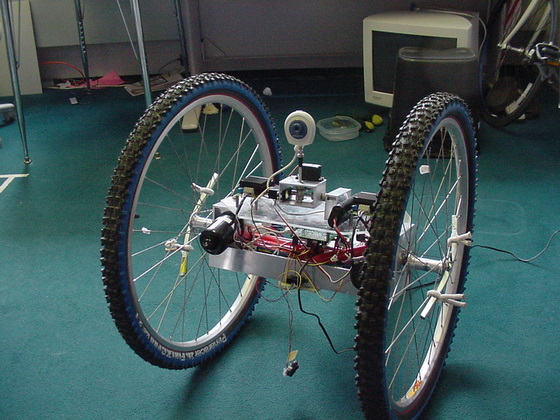
With Illah Nourbakhsh and Katia Sycara at CMU and Mike Lewis at PITT, our team designed and built a two-wheeled diff drive robot for navigating in a USAR situation. The robot had varied types of wheels and whegs for mobility in different types of terrain. We also developed what is now the NIST standard USAR simulator.№ 51/58
№ 1/1
Next project: → Malfunction
Previous project: ← Clock One